Conor Mulligan - Engineering Portfolio

Create Your First Project
Start adding your projects to your portfolio. Click on "Manage Projects" to get started


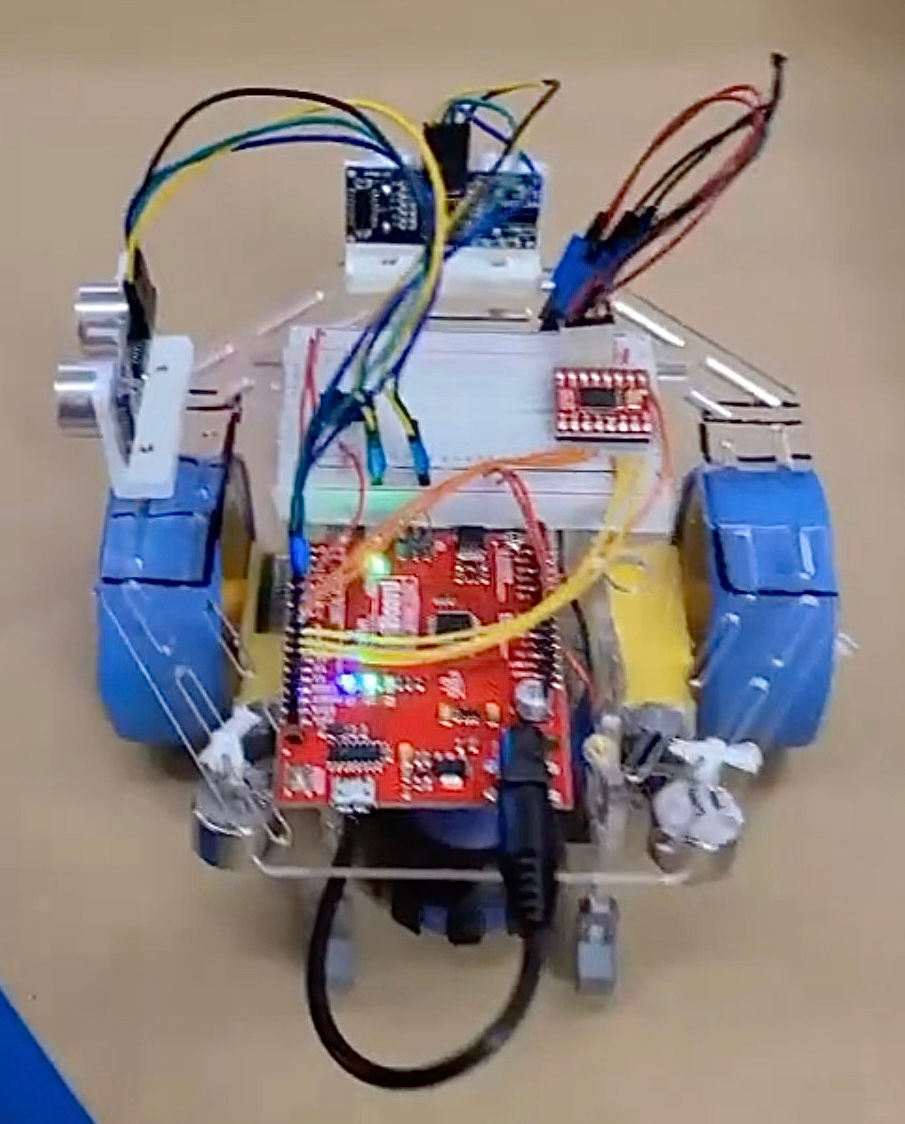
Autonomous Environmental Survey Robot
Challenges
- Achieved stable and reliable Bluetooth communication over extended ranges.
- Designed a rugged, all-terrain chassis to navigate obstacles and rough surfaces effectively.
- Calibrated environmental sensors to ensure real-time accuracy under varying conditions.
Results
- Successfully transmitted real-time environmental data via Bluetooth to a laptop for clear visual monitoring.
- Demonstrated effective manual control and environmental data collection in simulated hazardous scenarios.
Engineering Skills Demonstrated
- Mechanical Engineering: Designed and assembled a durable robot chassis with 3D-printed and prefabricated parts.
- Electronics Integration: Wired sensors and a Bluetooth module for remote operation and environmental monitoring.
- Programming: Developed Arduino code to process sensor data and display results in real time.
- Problem-Solving: Addressed wireless communication challenges between the robot and laptop.
Project Overview:
- Designed a manually operated robot to perform environmental surveys by detecting air quality, toxic gases, and temperature levels in real-time.
- Aimed to reduce human exposure to hazardous conditions by providing remote monitoring capabilities.
Design Steps:
- Built a four-wheeled, all-terrain robot equipped with environmental sensors to measure gas concentrations and temperature.
- Integrated a Bluetooth module to wirelessly transmit sensor data to a laptop, where it was displayed on a custom visual interface.
- Developed a manual control system using joysticks: one for movement and steering, and another for speed adjustments.